
992 posts
Posted 02 May 2012 - 03:25 AM
[LIDAR] Laser Detection and Ranging
is a system that uses lasers to measure an objects distance.basically it does this by sending a pulse of light to the object and measuring how long it takes to return.
In computer craft currently turtles are only capable of detecting objects that they directly are touching. What I am proposing is a LIDAR Peripheral device capable of accurate measurements over much larger distances.
How It would work
The LIDAR Peripheral would be placed on a computer or built into a turtle in a crafting grid. It would be called similar to how monitors work. ounce activated the LIDAR would respond to these commands.
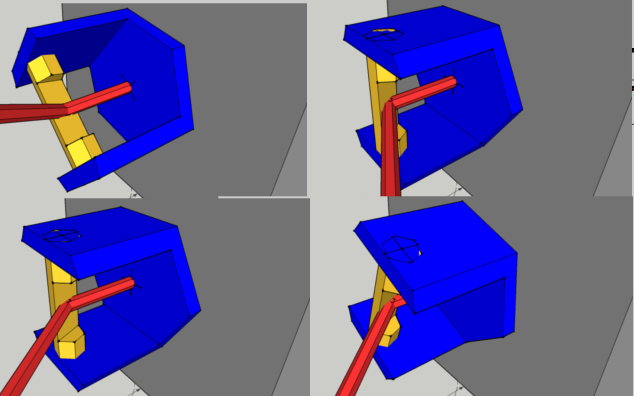
lidar.move(deg,deg) this would change the angels that the laser is pointing at.
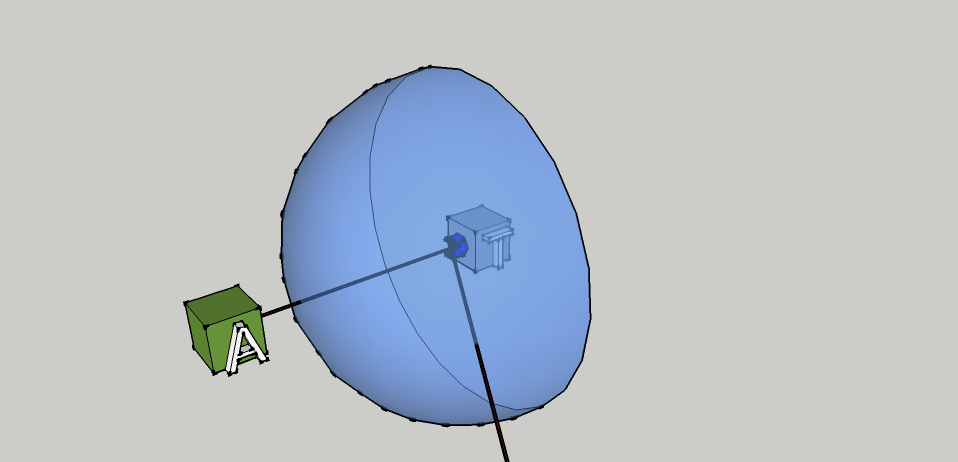
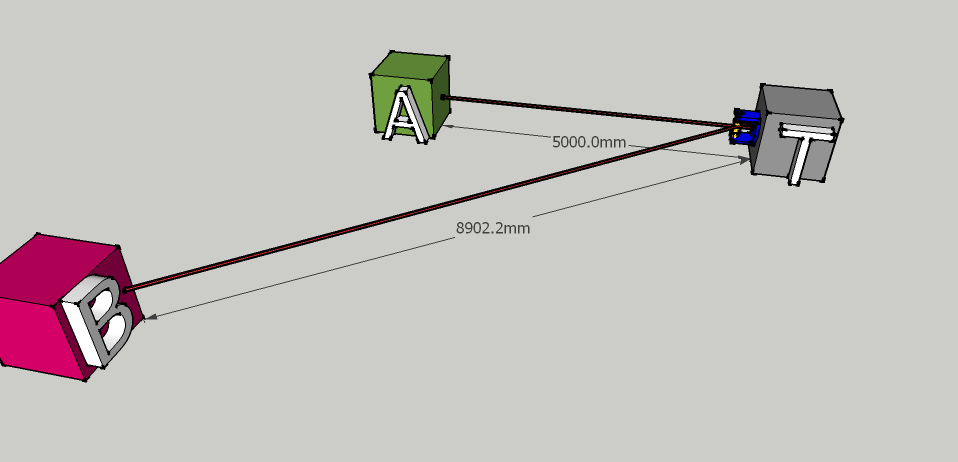
lidar.range() this would return 1) the distance to object along the current heading set by lidar.move
and 2) if the object was moving with a true false. the second would be true if any mob or player is in the way of the beam but would be false for all blocks. turtle .compare would not work over these distances (to keep is some what balanced.) lidar.range() would return nil if pointed at something out side its range or pointed at the top or bottom void as well as unloaded chunks
This combined with the GPS system would allow players to write programs that scan and record the landscape around them. they would also be able to be used as a mob detection when placed on a Computer.
Pictures to illustrate idea.
For more info on LIDAR see
http://en.wikipedia.org/wiki/LIDAR
is a system that uses lasers to measure an objects distance.basically it does this by sending a pulse of light to the object and measuring how long it takes to return.
In computer craft currently turtles are only capable of detecting objects that they directly are touching. What I am proposing is a LIDAR Peripheral device capable of accurate measurements over much larger distances.
How It would work
The LIDAR Peripheral would be placed on a computer or built into a turtle in a crafting grid. It would be called similar to how monitors work. ounce activated the LIDAR would respond to these commands.
lidar.move(deg,deg) this would change the angels that the laser is pointing at.
lidar.range() this would return 1) the distance to object along the current heading set by lidar.move
and 2) if the object was moving with a true false. the second would be true if any mob or player is in the way of the beam but would be false for all blocks. turtle .compare would not work over these distances (to keep is some what balanced.) lidar.range() would return nil if pointed at something out side its range or pointed at the top or bottom void as well as unloaded chunks
This combined with the GPS system would allow players to write programs that scan and record the landscape around them. they would also be able to be used as a mob detection when placed on a Computer.
Pictures to illustrate idea.
Spoiler
For more info on LIDAR see
http://en.wikipedia.org/wiki/LIDAR


