12 posts
Posted 02 September 2014 - 10:32 PM
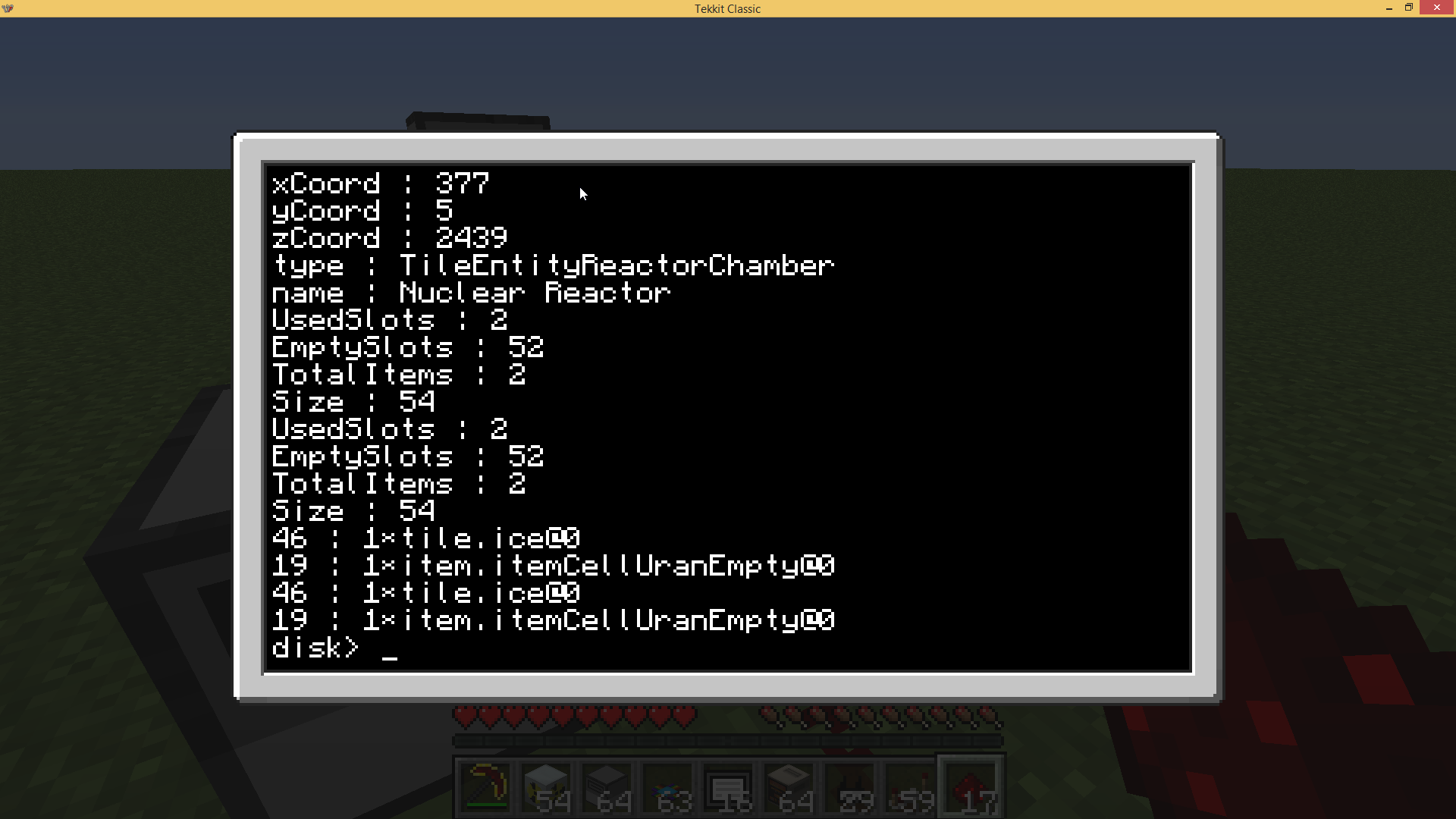
I'm pretty much a newb to coding, and I need a bit of help here. This is my goal, I have a nuclear reactor that is running, and when it's done with it's cycle I need the computer to
Thinking about it, it probably can be all incorporated in to one signal.
- Shut off the timer (redstone signal) to my ice generator.
- Turn off the Nuclear Reactor (another redstone signal)
- Turn on the timer (another redstone signal) to extract Depleted Isotope Cells
- Turn on the timer to input Uranium cells. (3 and 4 can be combined in to one signal.)
Thinking about it, it probably can be all incorporated in to one signal.
Edited on 02 September 2014 - 09:52 PM