147 posts
On Earth
Posted 01 September 2017 - 02:20 PM
So, I've been working on a 3D renderer:
http://www.computerc...-rendering-api/
http://www.computerc...48-3d-renderer/
Here's a GIF (Real time ; Not sped up):
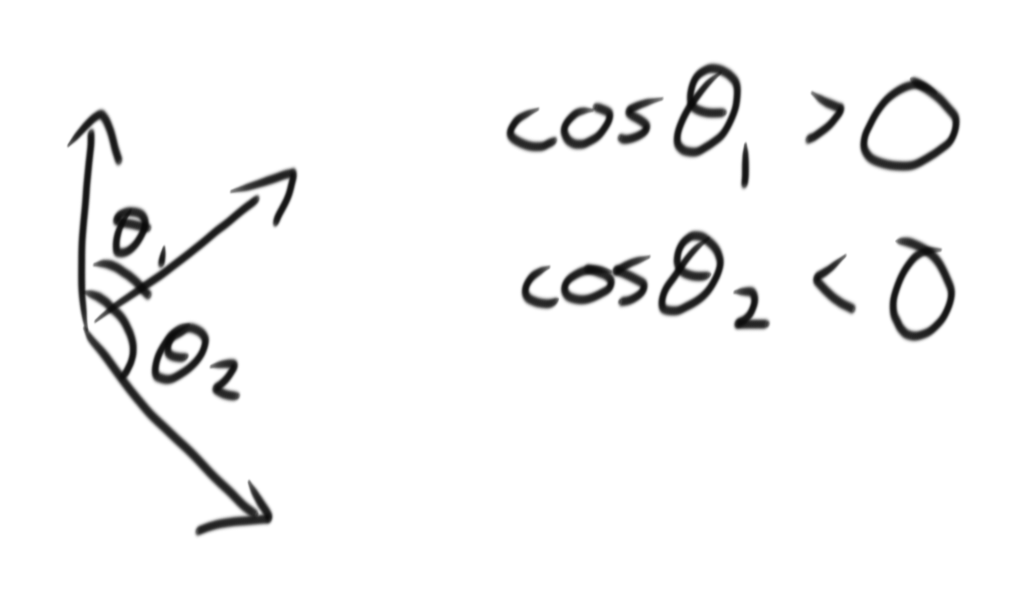
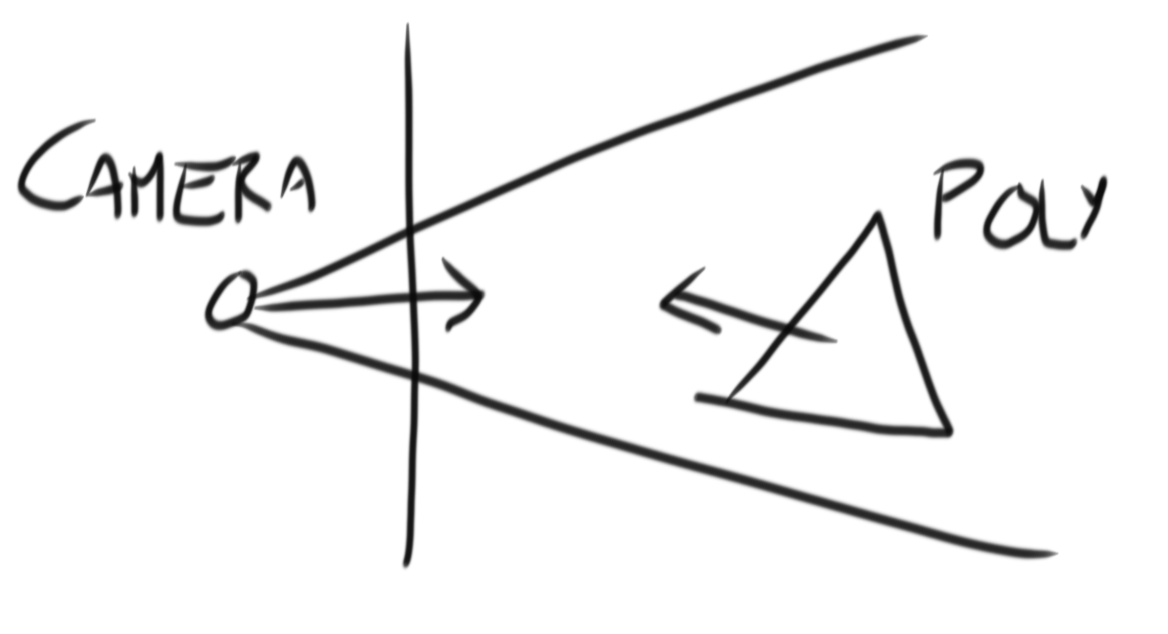
I'd like to optimize the performance by not rendering as many polygons, because the lag starts kicking in as soon as more polygons are rendered. Bomb Bloke recommended that I should only render polygons if they are facing towards the camera.
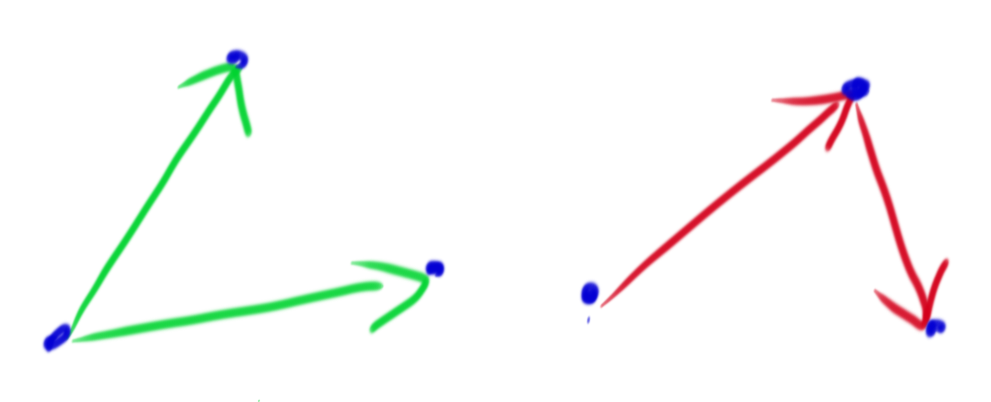
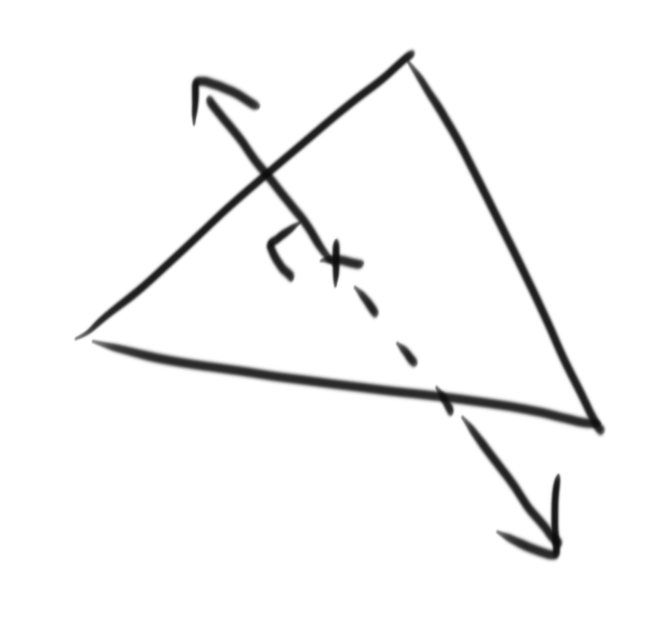
Does anyone know how I can pull this off? Do I need to save the "front" of a polygon inside the model file? How do I detect which way it is from the camera?
For example:
An object can be loaded at oX, oY, oZ with one of the loaded models.
http://www.computerc...-rendering-api/
http://www.computerc...48-3d-renderer/
Here's a GIF (Real time ; Not sped up):
I'd like to optimize the performance by not rendering as many polygons, because the lag starts kicking in as soon as more polygons are rendered. Bomb Bloke recommended that I should only render polygons if they are facing towards the camera.
Does anyone know how I can pull this off? Do I need to save the "front" of a polygon inside the model file? How do I detect which way it is from the camera?
For example:
local cameraX
local cameraY -- Y is the height just like in MC
local cameraZ
local model = {
{x1 = ..., y1 = ..., z1 = ..., x2 = ..., y2 = ..., z2 = ..., x3 = ..., y3 = ..., z3 = ..., color = ...}; -- This is one of the vertices in the model
{x1 = ..., y1 = ..., z1 = ..., x2 = ..., y2 = ..., z2 = ..., x3 = ..., y3 = ..., z3 = ..., color = ...};
{x1 = ..., y1 = ..., z1 = ..., x2 = ..., y2 = ..., z2 = ..., x3 = ..., y3 = ..., z3 = ..., color = ...};
{x1 = ..., y1 = ..., z1 = ..., x2 = ..., y2 = ..., z2 = ..., x3 = ..., y3 = ..., z3 = ..., color = ...};
}
An object can be loaded at oX, oY, oZ with one of the loaded models.
Edited on 14 November 2017 - 07:54 PM